International Space Elevator Consortium
September 2025 Newsletter
In this Issue:
Space Elevator Academic Challenge 2026
Chief Architect’s Corner
Project Fibonacci Presentation
Space Elevator Design Verification
History Corner
Tether Materials
Around the Web
Upcoming Events
Contact Us
Space Elevator Academic Challenge – 2026
Offered by the International Space Elevator Consortium and the National Space Society
by Paul Phister, Chair, Academic Challenge 2026
Utilizing AI Technologies for a Space Elevator Mission – Planetary Defense
What is the Space Elevator Transportation System? Imagine an advanced lift system which moves not the 20 tonnes of payload to GEO of current launchers, or the 50 tonnes to GEO of advanced Falcon Heavy launches, but a permanent space access infrastructure capable of moving 170,000 tonnes every year, and with no atmospheric pollution when it is mature. Also, imagine this making it possible for everyone to visit space in the decades ahead, by taking a leisurely and scenic journey from the Equator to orbit. Imagine this making it possible for us to build lush, green, and beautiful space habitats with artificial gravity, so people can finally live and work in space, removing population pressures from our precious ecosystems. Forever. Imagine this making it possible to provide clean, abundant energy and clean natural resources. Yes, all of that can become possible by building and operating one or even multiple Space Elevators as a permanent transportation system for the near future, doing for us what rockets cannot!
The Greatest Achievement in Human History: When we think of great achievements, many come to mind. Many of us will think of the Pyramids as an example. The Great Pyramid is 5.75 million tons and stands 0.14 km high. Now, imagine the Space Elevator system, which will weigh 4,195 tons and stand 100,000 kilometers from the surface of the Earth; a quarter of the distance to the Moon! By building these elevators near the Equator, they will enable a whole new economy—a real, thriving space-and-Earth economy, delivering to humanity abundant clean power and raw materials, new places to live, and eventually even building starships in orbit. This could be YOUR future. YOUR legacy. We're counting on YOU to help make it happen!
Background Information: In the recent ISEC paper “Apex Anchor: Full-Service Logistics Transportation Node at the Top of the Gravity Well,” by Paul Phister, Joyce Efferdink, Peter Swan, and Sandra Therrien, it was determined that a multitude of capabilities can be performed within the Apex Anchor. One of the most important was regarding Planetary Defense. (To learn more about the characteristics of the Space Elevator, review the body of knowledge at www.isec.org and review past entries in the Academic Challenge website at https://www.isec.org/academic-challenge.)
THE CHALLENGE: Can you contribute to the future of humanity with great ideas developed from recent discoveries? This contest is for high school and university students from around the world. The challenge encourages you to expand your imagination by exploring the use of AI technologies towards a particular mission ideally suited to the Space Elevator, namely Planetary Defense. You will need to explain how AI technologies, within the Space Elevator’s transformational characteristics, will achieve Planetary Defense. These range from on Earth, the journey to orbit, in orbit at the Apex Anchor, or further out into space. Imagination will be appreciated – but remember that everything in your submission must be based on well-researched facts. This challenge should be something that excites YOU. You can either enter as an individual or as a member of a team (up to four students).
Selection Process: The selection process from papers and then to videos will be competitive and lead to three prize winners.
1st prize = $2,000 USD, 2nd prize = $1,000 USD, 3rd prize = $500 USD
(Prize money to be equally divided among team members and delivered via PayPal.)
NOTE: Submission grants ISEC the full rights to abstracts, papers, and videos to be used in future ISEC/NSS endeavors.
Submissions will be judged based upon:
+ Your insight into future possible uses of AI technology towards Planetary Defense mission for Space Elevators.
+ Your presentation of the arguments in favor of the use of the Space Elevator system for Planetary Defense.
+ Your creative concepts for using Space Elevators that lead to a better future for humanity.
Submission Format
1. Submission of an Abstract, in this format (by 15 Sep. 2025):
- Title of Submission
- Team Member Name(s) (up to four)
- Team School(s)/University(s) clearly stated.
- Team Mentor(s) (clearly delineated on application)
- Student verification ID submitted via:
(https://www.sheerid.com/business/identity-marketing-platform/solutions/verification/student/)
- One Email contact (lead student’s email, not mentor's)
- Submission of Intent sent to: spaceelevatorchallenge@isec.org
2. Submission of up to a 15-page paper submitted in English, in PDF format (by 15 Jan. 2026):
- Submitters will be provided with access to the ISEC Zotero library to assist with further research on their paper.
- Picture of Team Member(s) clearly identifying students. (Pictures will be used in final awards)
- Paper submissions sent to: spaceelevatorchallenge@isec.org
3. For selected finalists, an audio/video (MP4) will be submitted (by 15 Feb. 2026).
- Audio/video must be 10-mins or less and sent to: spaceelevatorchallenge@isec.org
- Video Link sent to: spaceelevatorchallenge@isec.org
4. Winners will be invited to present their paper at the National Space Society’s International Space Development Conference as well as the ISEC Conference in 2026.
Submission Process and Timeline
1. Announcement of Space Elevator Academic Challenge – 01 September 2025
2. Submission of Abstract to enter competition – 15 October 2025
3. Paper submission – 15 January 2026
+ Finalist selection, notification (top 10) – 01 February 2026
4. Finalist audio/video submission – 15 February 2026
+ Final Selection (top 3) – 01 March 2026
Winners:
+ Winning submissions will be published on the ISEC YouTube channel and other social media.
+ Potential invitations to attend NSS Conference – June 2026
+ Potential invitations to attend the ISEC Conference – September 2026
Questions? Write to spaceelevatorchallenge@isec.org
Chief Architect’s Corner
by Pete Swan
Involvement Leads to Outreach
The ability to volunteer in support of our passions is almost uniquely individual but shared across the research community. You are reading the ISEC newsletter, so you are involved at least a little bit with our mission of building Green Roads to Space. This is important and, “Thank you!” from its Chief Architect. However, one of my recurring themes is the ability to spread the word. Bringing in new players to help us is vital. Here is one example:
Space Solar Power is a concept that will revolutionize our ability to provide clean energy around the world at very competitive prices. There are three parts to this mission: First, provide clean energy gathered from the Sun at geosynchronous orbit and ship it down to receiving antennas distributed around the world. Second, space elevator concepts can enable these huge satellite vehicles (>2,600 tonnes each) to reach geosynchronous, thus, supplying electricity where it has not been available before – as well as supplementing current energy sources in the developed world. And third, the space elevator programs can provide this clean energy globally while leveraging its “green” approach – raising spacecraft to GEO by electricity vs. rocket fuel combustion in our atmosphere – thus reducing the needs for coal burning plants, especially in locations like Africa where the population is set to double in the next three decades. The current estimate to significantly enhance Net-Zero initiatives around the world and meet the goals of carbon restrictions is to build 300 satellites to produce 2 Gigawatts of power each. The conundrum is that each of these satellites will have a mass of greater than 2,600 tonnes to geosynchronous orbit. As we know, the rocket equation restricts rockets to delivery of only 2% of the pad mass to that high orbit. Not only is that a lot of payload mass (2,600 x 300 = 780,000 tonnes) to lift off the ground, but each rocket has a significant impact on the atmosphere as it burns rocket fuel.
This is an example of where Modern-Day Space Elevators can significantly help raise that amount of mass to GEO (at 70% delivery efficiency) and greatly help the atmosphere with a Green Road to Space while lifting payloads with electricity. Our involvement with multiple international organizations studying Space Solar Power programs has led to the recognition that this “advanced technology” (space elevators) can contribute to SSP’s development. Space elevators will help enable this monumental program leading to inexpensive, environmentally friendly, and global electricity from GEO.
The National Space Society and the International Academy of Astronautics are both supporting a major study report (3 years and many global authors) looking at the feasibility and approach for fulfilling this mission. In the past, the IAA published two major space elevator research studies while both the NSS and the IAA support our space elevator technical sessions at their conferences. This is an example of reaching out to your organizations and helping them reach their goals with papers, talks, presentations, conference attendance, and hopefully, major studies promoting their objectives by using the space elevator’s strengths.
Please reach out and get involved with your favorite organizations and include discussions on space elevators. This will provide much further reach for our customers and ideas. If you need help to become involved, send me a note at info@isec.org.
Project Fibonacci Presentation
by Paul Phister, ISEC Education Chair
On July 29th, 2025, two one-hour Space Elevator sessions were conducted as part of the 2025 Project Fibonacci conference titled “The Science of the Unknown: Living in a Material World”. This was the 7th Annual Project Fibonacci STEAM Leadership Conference held at the Griffiss Business & Technology Park from July 27th to August 2nd.
The Space Elevator problem posed was, “Should the Tether be one continuous length (e.g., 100,000 Km) or segmented? Provide advantages/disadvantages for your solution.” Three areas were investigated: LEO, GEO, and Apex Anchor using Graphene as the Tether.
A total of 30 students provided the following insights:
Continuous Tether:
1. Tether should be continuous to reduce overall costs.
2. If Tether is continuous, then if it breaks you lose everything.
Multiple segmented Tethers:
1. It would be easier to fix.
2. It would be easier to build.
3. Multiple Tethers are more difficult to build.
4. Lowest segment station must not be in the atmosphere.
5. It would be easier to change sections if one segment breaks.
6. Allows stations at each of the segments.
7. Segmented so that if the higher section breaks then it can be fixed easier if there’s multiple cables holding it up.
8. Should have multiple Tethers so Climbers can go up and down on separate cables.
9. Multiple Tethers would increase maintenance costs at the various segment intersection.
10. Multiple Tethers increase probability of hitting space debris.
11. Multiple segments of the Tether allow for checkpoints for human travelers (e.g., waystations).
General Observations:
1. Tether should be very thick, so it doesn't break as easily.
2. Provide power through the center of the Tether.
3. Tether should be hollow so the wind could blow through.
4. Utilize the Tether to Apex Anchor for waste disposal (e.g., nuclear).
As part of ISEC’s Education thrust, the objective of this effort was to expose young adults to the Space Elevator concept. This was a successful endeavor with more planned in the future.
Space Elevator Design Verification
by Peter Robinson
Part 1: Introduction, Technology Readiness & Design Verification
1. Introduction – Project Management
Construction of an Earth Space Elevator will be a multi-billion (USD, Euro, or GBP) “mega-project” requiring detailed project management for planning and ensuring objectives are met within the required timescales and cost targets.
Commercial, military, space, and other industries use a range of different project management methodologies to control all aspects of a project; typically addressing areas such as engineering, manufacturing, quality control, logistics, safety, resources, legal, financial, and more. The chosen management methodology is likely to include review points or “Gateways” with a series of check lists that must be met before work proceeds to the next level.
This and subsequent articles will concentrate on Design Verification, part of the Engineering aspect of the project. I will first describe the “Technology Readiness Level” (TRL) methodology [1] used by NASA [2], ESA and other space industries and compare this with “Design Status”.
2. TRL Summary
These words from Wikipedia summarise the “TRL” system:
“Technology readiness levels” (TRLs) are a method for estimating the maturity of technologies during the acquisition phase of a program. TRLs enable consistent and uniform discussions of technical maturity across different types of technology. TRL is determined during a Technology Readiness Assessment (TRA) that examines program concepts, technology requirements, and demonstrated technology capabilities. TRLs are based on a scale from 1 to 9 with 9 being the most mature technology.
TRL was developed at NASA during the 1970s. The US Department of Defense has used the scale for procurement since the early 2000s. By 2008 the scale was also in use at the European Space Agency (ESA). The European Commission advised EU-funded research and innovation projects to adopt the scale in 2010...”
See [3] for a simple video explanation of the TRL scale, summarised in Figure 1 below.
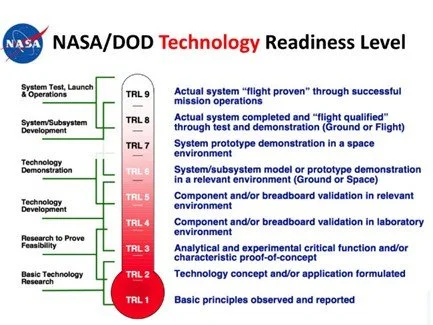
Figure 1: TRL Summary. Credit: NASA.
3. TRL and Design Verification
TRL level determination is a complex exercise, requiring input from multiple subject matter experts and independent and critical review. For the Earth Space Elevator, the TRL levels for various sub-systems have been assessed in a number of studies led by ISEC members and others, notably in the 2013 IAA Study [4]. This work has yielded relatively high TRL levels for various sub-systems, in the range TRL-6 to TRL-9, concluding that Space Elevator technology is “ready for development”.
Technology Readiness does not necessarily mean that designs, or even design concepts, are available for every Space Elevator sub-system. Some design concepts need to be explored further for a selection of an optimum solution, this would then be followed by detailed design, prototype verification testing (initially virtual), design refinement, etc.
Different organisations will use different and often complex project management methodologies to assess the progress of Design Verification, but I will not explore those here or predict which system a future Space Elevator mega-project might follow; instead, I will apply the general stages of the TRL system to the Space Elevator Design Verification Process.
4. Space Elevator Sub-System Definition
The Space Elevator system will consist of several novel sub-systems for which I will consider Design Verification status individually and for simplicity focusing on three sub-system parent groups as follows.
+ Tether
This includes the definition of a suitable tether material, together with development of manufacturing methods capable of producing it at an adequate rate whilst meeting all necessary quality standards.
+ Climber
This covers the definition and design of mechanisms to ascend the tether (Climbers) including the specification of motors, power supply systems, tether interface systems, steering systems, cooling systems, control systems, and overall vehicle integration. Different climber concepts or variants may be required for the ascent through Earth’s atmosphere, and perhaps also for the journey from GEO to Apex if this is required.
+ Dynamics
This covers all aspects related to the motion of the tether and climber(s). This includes tether dynamic control for collision avoidance, integrated with a real-time predictive model, position metrology, satellite position databases, and more. It would also include the reel-in-reel-out (RIRO) winch systems at the Earth Port and other systems required at GEO, the Apex Anchor or elsewhere for control purposes.
5. Space Elevator Design Verification, Phases 1 and 2
Stages 1 and 2 of the NASA TRL process are depicted in Figure 2 below, an expanded version of the stages summarised in Figure 1.
Figure 2: TRL Definitions. Credit: NASA.
I will apply these broad descriptions to Design & Verification Phases, as depicted for Phases 1 and 2 in Figure 3 below. (Other Project Management systems will have other methodologies.)
Figure 3: Proposed Design Phase Definitions (1, 2). Credit: NASA, P. Robinson.
My brief analysis of the current Space Elevator Design Verification status can be found below. This is partly based on recent ISEC newsletter President’s Notes which describe five technology & design challenges in more detail than I will here; see references [5] [6] [7] [8] and [9].
5.1 Tether
The development of Graphene and potential production methodologies is in process, with peer-reviewed papers describing a material meeting the SE strength requirements. Production of the Graphene Super Laminate (GSL) material has begun, but testing macro-scale material with the required tensile strength has not yet been documented. When this is reported the exit criteria for Design “Phase 2” will be achieved.
5.2 Climber Technologies
Published work over many years has described several climber conceptual designs for climbers operating in space, such as the 2023 ISEC Climber/Tether Interface study [10]. This would meet the requirement for Design “Phase 1”, but achievement of “Phase 2” requires additional concept work on a number of key sub-systems that I propose have not been adequately addressed (for example motor selection, climber steering, and cooling systems). Completion of a comprehensive concept design would achieve Design “Phase 2”.
More work is required for the ascent through Earth’s atmosphere, with a number of concepts proposed but no single agreed fully satisfactory solution. This means Design “Phase 1” has yet to be achieved for atmospheric ascent.
5.3 Dynamics
This is a wide category comprising both hardware and software, and I believe several areas have not been adequately defined to meet Design “Phase 1”.
Dynamic tether simulation software is available and being developed further [8], but I am not aware of peer-reviewed work describing the integration of these models with tether control algorithms. The metrology systems required to measure the real-time tether position have been mentioned by myself in an early ISEC presentation but not described in published work in any detail. Similarly, comprehensive strategies for active control of the tether position using RIRO or other systems have not been reported.
(Some earlier work has suggested a human-operated control centre, but I believe the task is too complex for detailed human involvement).
6. Proposals for Future Work
6.1 Design Phase 2
Ongoing successful Graphene development would result in the “Tether” system achieving Design Phase 2.
Further studies by ISEC would result in the “Climber” categories achieving Design Phase 2, though this could be completed more rapidly by a funded full-time professional design team.
The “Dynamics” category requires significant work on a number of sub-systems, in particular definition of suitable concepts for tether position metrology and control. A coding structure is required to describe integration of the control sub-systems.
6.2 Design/Verification Phases 3 and Beyond
Based on the TRL structure (summarised in Figure 1) I suggest that simple Design/Verification Phases might include some of the following tasks.
Phase 3 – the start of Design Verification, including virtual and real-world testing to confirm Design functionality.
Phase 4 – further ground testing to optimise and refine design details.
Phase 5 – initial space testing of materials and sub-systems
Phase 6 – space sub-system prototype testing to verify designs.
Phase 7 – space testing to verify integrated system operation.
Phase 8 – assembly and qualification testing of first Earth Space Elevator.
I plan to suggest example content of each of these Phases, starting with Phase 3 in the next article. This work will only cover selected engineering tasks and cannot include all aspects of what will be a highly complex project.
7. REFERENCES
[1] Wikipedia “Technology Readiness Level”
[2] Technology Readiness Levels - NASA
[3] YouTube Video with Simple TRL Explanation
[4] Swan, P., Raitt, Swan, Penny, Knapman. International Academy of Astronautics Study Report, “Space Elevators: An Assessment of the Technological Feasibility and the Way Forward”, 2013, Virginia Edition Publishing Company, Science Deck (2013) ISBN-13: 978-2917761311
[5] Dennis Wright: February-2025 ISEC Newsletter President’s Notes (“Strong Materials”)
[6] Dennis Wright: March-2025 ISEC Newsletter President’s Notes (“Climbability”)
[7] Dennis Wright: April-2025 ISEC Newsletter President’s Notes (“Space Debris”)
[8] Dennis Wright: May-2025 ISEC Newsletter President’s Notes (“Dynamic Control”)
[9] Dennis Wright: July-2025 ISEC Newsletter President’s Notes (“Bottom End”)
[10] 2023 ISEC Study “The Climber-Tether Interface of the Space Elevator”
History Corner
by David Raitt, ISEC Chief Historian
Space Elevator References in Other Languages
In the August 2025 Newsletter I noted there was a forgotten internet with many websites having disappeared over the years, but their traces and contents could still be discoverable – and I mentioned several older articles about space elevators that we might have missed.
However, there is another problem too with the internet and that is language! We tend to search in our own language, and this means that we are only seeing the tip of the iceberg. There will undoubtedly be many interesting and potentially useful articles and papers that are to all intents and purposes utterly lost to us because we are searching in a different language. (https://www.bbc.com/future/article/20250812-how-language-is-hiding-the-real-internet-from-you).
So, I decided to translate the English word “space elevator” into various languages to see what I could find. I started with Russian – Google Translate gave me “космический лифт” (roughly cosmic lift!) and when I searched on this term I got not only the Russian version of Wikipedia, but also quite a few articles, blogs, and videos (see Fig 1). Of course, this is not too helpful unless you happen to speak Russian – but it does show that there is quite a lot of material on Russian websites.
Figure 1: Russian language cropped search results. Image credit: screenshot by David Raitt.
Fortunately, Google does allow you to translate a search (or site) into another language and when the search results were translated into English I got various articles, videos, and sites discussing the space elevator, its progress, and its history. Some of these items are quite recent. By clicking on any of them you get taken, of course, to that particular item on the whatever website. It will be in Russian, but again, you can translate it into English. Clicking on the title “Space elevator: concept and technology” I got some material from Knowledge Wiki and in the Notes were some references, the first being entitled, “Father of the Space Elevator” – that took me to the Russian Academy of Sciences page and translating that page provided a synopsis of the life of Yuri Artsutanov! Selecting the title “space elevator – Space – Max Polyakov” takes you to Max Polyakov’s website and the translated title of this article is, “Futurological space structures, part 2: space elevator” posted on the 30th of August 2023. (https://maxpolyakov.com/ru/kosmicheskiy-lift/) Besides covering the space elevator, the article also discusses the advantages of the Skyhook over space elevators and orbital rings. To take another example, click on “Space elevator - Satisfactory Wiki – Fandom” and you go to a page, which when translated into English, appears to be a game where you get to build a space elevator! In fact, Satisfactory Wiki seems to be an English language website
(https://satisfactory.fandom.com/wiki/Space_Elevator) – but not one that I have come across before.

Figure 2: Russian language search results: video selection. Image credit: screenshot by David Raitt.
Unfortunately, the videos that are featured on the Google search are in Russian. However, if you look at the third one listed by Vladimir Surdin on the Japanese making a space elevator, the title can be translated into English and if you play the video, you can get English-generated subtitles.

Figure 3: Japanese language cropped search results. Image credit: screenshot by David Raitt.
Looking at Japanese articles (Fig 3), there are several interesting entries when translated, e.g., “Will the space elevator really come true?” and, “What will happen if it comes true? Who will make it? Space elevator construction concept and potential?”. The first article is a general introduction, while the second was first posted in February 2023, but updated on 18 March 2025. This second article looks at space elevators from various aspects: the road to the present, what the space elevator brings, construction plan, and domestic and international trends and future prospects. The first aspect gives a potted history of space elevators from Tsiolkovsky to Edwards via Artsutanov and Pearson, mentioning Clarke along the way. The second aspect notes that the advantage of the space elevator is its low cost and discusses the cost and weight of rocket fuel. It then goes on to say:
“The cost of a space elevator is difficult to estimate at this stage, but according to one theory, the cost of building the first space elevator is 1 trillion yen. However, if you use the first space elevator to make a second space elevator, it is said that the cost can be reduced by about 40% compared to the first case. If you use the second machine to reduce the construction cost, such as the third machine, the third machine, and the fourth machine, even if you hit your head somewhere, it will drop to about 1,000 yen per kilometer.”
“In addition, the current space elevator model is supposed to use motors to rise [i.e. climbers to carry cargo], so it is possible to raise about 20 tons of cargo frequently because it does not require rocket fuel. If it is possible to increase about 50 times a year, it will be 10,000 yen per kilo, and 5,000 yen if it is 100 times a year. If this cost is realized, it will be possible to access space at a low cost, and humans will be able to advance to Mars.”
The third aspect looks at the construction possibilities, based on Obayashi’s designs. The fourth aspect is a little outdated insofar as it mentions LiftPort and Thoth, but under domestic trends it states that Obayashi will start constructing Earth ports in 2025. The article concludes with a look at who will make a space elevator and the idea that it should be an international effort. (https://www.mebs.co.jp/useful/technology/1200222_1625.html).
It seems that Hindi is the most prolific language for uploading YouTube videos, so I thought it might be interesting to search for space elevators in Hindi. There is a plethora of sites and information as a translation of the Google search page on the term shows – including items on Facebook, and some nice videos. It would appear that there is not much original research going on and the articles are rehashes of what has been gleaned from various news and other sites. But, in common with Russian, Japanese, Chinese, Spanish, English, and other language sites, they all do give a different take on the topic of space elevators, and this is something we are missing if we only search in our own language!
To illustrate with just one more example. Searching on the Chinese term for space elevator yields many links to articles and sites. One of them, dated 16 August 2024 caught my eye with the translated title reading “How is progress of the 'space elevator' plan of Japan’s Dalin Group?” Well, I had never heard of the Dalin Group, and clicking on the item and then getting its English version, the first paragraph reads:
Image Credit: Obayashi Group.
“In 2012, the Japanese architect Dalin Group proposed the 'space elevator' plan, which shocked the world (Fig 4). The 'space elevator' is a dreamy means of transportation for people to take an elevator from the earth to space. When the plan was released, the goal set by the Dalin Group was to start work in 2025. Now that this time is imminent, how far has the development of 'space elevator' progressed?”
Later in the article, we read that, “As a construction company, the Japanese Dalin Group put forward specific construction methods. First, assemble and build a spaceship for a space elevator at an altitude of 300 km, and then move the spacecraft to geostationary orbit. Then stretch the carbon nanotube cable from the spacecraft down, connect the spacecraft to the ground with the cable, and then install the elevator on the cable. The elevator shuttles between the ground and the universe, and while strengthening the cables, it builds facilities such as the stationary orbital space station. Yasuhiro Buchida of the Dalin Group said: 'It takes a total of 510 times to reinforce the cable, and it will take about 20 years to complete it.'” (https://zh.cn.nikkei.com/columnviewpoint/column/56247-2024-08-16-05-00-23.html).
This is fascinating stuff – dating back to 2012. How come the Chinese had picked up on a Japanese concept, while we in the West apparently had not? So, I decided to do a normal Google search in English on the Dalin Group. The first link gave a brief summary that described the Group (actually spelled Dahlin) as a diverse architecture, planning, and interiors firm, practicing globally. No links on the first page mentioned space elevator, so I searched on “dalin group space elevator” (I also tried “dahlin”). I got an AI Overview that baldly stated that:
“The "Dalin Group" is not associated with any known, publicly discussed space elevator projects or research. While the concept of a space elevator has been around for decades, and there's ongoing theoretical work and some architectural designs, there's no real-world project with that name. Existing space elevator discussions focus on technical challenges like material strength and construction methods, rather than specific company involvement.”
When I clicked on that first link which took me to the Dahlin Groups website, I couldn’t find any reference to a space or cosmic elevator even though Yasuhiro Fuchida of the Future Technology Creation Department of the Technology Department of the Dalin Group, which carried out the development of "Space Elevator" with "Dalin Group · Space Elevator gave a speech at the Tokyo International Information Technology Exhibition (Interop Tokyo 2024) held from June 12 to 14, 2024 which concluded that although the Dalin Group has been seriously and down-to-earthly developing key technologies, the issues that need to be solved are still piled up, and there is still a long way to go.”
Well, it’s not too important I suppose – it was in 2012 and has not gone very far because of the materials (graphene does not seem to get a mention at least on the first couple of pages on the different languages) but we do learn that other groups and individuals besides Brad Edwards and his company, LiftPort, Thoth, and Obayashi were also looking into the concept – and some still are!
Tether Materials
by Adrian Nixon
Spot Welding Layers of Graphene Can Now Be Done - and it Makes Superdiamond
In our March 2023 newsletter, we explored the behaviour of layers under pressure as climber wheels gripped a flat tether ribbon made of multilayered graphene. We found that the outer layers would slide over the inner ones. This was a problem because it would make it hard for a climber with opposing wheels to start climbing and stop safely when required.
We proposed a hypothesis for cross-linking between the graphene layers and called this spot-welding [1]. We now know a team in China has done exactly this and proved the hypothesis.
Let’s begin with a brief recap of the different forms of graphene and graphite and the language used to describe each. The International Standards Organisation (ISO) defines graphene as a two-dimensional material up to 10 layers thick, beyond which the electrical properties of the material are not distinct from those for the bulk material, known as graphite [2].
We are interested in the thermal, optical, and particularly, the mechanical properties of multilayered graphene and proposed a new term to describe a bulk material made from many layers of single crystal graphene. We called this graphene super laminate (GSL) [3], and this is the leading candidate material for the space elevator tether. Figure 1. shows the differences between these materials.
Fig 1. Graphite, graphene and graphene super laminate.
You may recall we discussed the shear behaviour of layers in graphene laminates (multi-layered graphene). The bonding within each layer is incredibly strong, but between the layers are van der Waals (VdW) bonds that are weak. When one side of the graphene laminate is subjected to a shear force in one direction and the other side to a shear force in the opposite direction, the effect would be to make the layers in the bulk material slide over one another.
We hypothesised that layers of graphene could be cross-linked or spot-welded to change the bonding from two-dimensional, sp2 to three dimensional, sp3 diamond carbon-carbon bonds [4]. In doing so, the multi layered graphene would change to diamond. Depending on the conditions, two types of diamond could be formed. Normal, cubic diamond and the rarer hexagonal diamond called Lonsdaleite.
The latest research published in nature this month shows this cross-linking can now be done [5].
A team at the Centre for High Pressure Science and Technology Advanced Research in Beijing, China has made stable crystals of hexagonal diamond from large single crystals of graphite (graphene super laminate). Fig 2 summarises the work.
Fig 2. High pressure and temperature forming of hexagonal diamond from graphene super laminate.
The team used a diamond high pressure anvil with 20 GPa pressure to form the crosslinks between the graphene layers and stabilised the material with laser heating to 1400°C. This broke the sp2 carbon-carbon bonds in graphene and allowed them to reform as the sp3 bonds in hexagonal diamond.
The team proved the formation of the hexagonal form of diamond by x-ray diffraction. They also used spectroscopy to confirm a 100% conversion of sp2 to sp3 bonding. This revealed that all the graphene was converted into diamond. They also tested the Vickers hardness of the material and found it was harder than normal diamond. The technical press is already calling this Superdiamond [6].
The team have used that high pressure and temperature method to make their hexagonal diamond. We know there are other methods that can be used such as irradiation and femtosecond laser pulses. We can wait to see if this team tries these alternative methods too.
References:
1. Nixon, A. (2023). Sliding of Layers in Graphene Super Laminate. [online] International Space Elevator Consortium. Available at: https://www.isec.org/space-elevator-newsletter-2023-march/#tether [Accessed 28 Aug. 2025].
2. ISO.org. 2021. ISO/TS 80004-13:2017(en) Nanotechnologies — Vocabulary — Part 13: Graphene and related two-dimensional (2D) materials. [online] Available at: <https://www.iso.org/obp/ui/#iso:std:iso:ts:80004:-13:ed-1:v1:en> [Accessed 28 August 2025].
3. Nixon. A., 2021. The graphene and graphite landscape: Indications of unexplored territory. Nixene Journal, 5(10), pp.9-20
4. Nixon. A., 2023. Van der Waals force and sliding of layers in graphene superlaminate. Nixene Journal, 7(3), pp.17-20
5. Yang, L., Lau, K.C., Zeng, Z., Zhang, D., Tang, H., Yan, B., Niu, G., Gou, H., Yang, Y., Yang, W., Luo, D. and Mao, H.-K. (2025). Synthesis of bulk hexagonal diamond. Nature. doi: https://doi.org/10.1038/s41586-025-09343-x.
6. Mondal, S. (2025). Scientists design superdiamonds with theoretically predicted hexagonal crystal structure. [online] Phys.org. Available at: https://phys.org/news/2025-08-scientists-superdiamonds-theoretically-hexagonal-crystal.html [Accessed 28 Aug. 2025].
Around the Web
Dr. Swan presents the Modern-Day Space Elevator concept on “The Polymath World Channel.” His hour covers the concept and investigates many areas of interest. "The Polymath World Channel brings you interviews with extraordinary researchers and academics working on the frontiers of their disciplines. Meet and hear from scientists, professors, lecturers, researchers, engineers, philosophers and astronauts.”
Address: https://www.isec.org/2025-polymath-world-space-elevators
or: https://www.youtube.com/watch?v=6Hc08W6sgzQ

Mordy Friedman of WSPEC is interviewed by LiftPort Group starting at 30:30:
Upcoming Events:
76th International Astronautical Congress
Sponsored by the International Astronautical Federation (IAF)
https://www.iac2025.org/about/
Monday, September 29th, through Friday, October 3rd, 2025
International Convention Centre, Sydney, Australia
International Space Development Conference 2026
Sponsored by the National Space Society
https://www.isec.org/events/isdc2026
Thursday, June 4th, through Sunday, June 7th, 2026
Space Elevator Session, Saturday, June 6th
Hilton McLean Tysons Corner
77th International Astronautical Congress
Sponsored by the International Astronautical Federation (IAF)
https://iac2026antalya.com/
Theme: “The World Needs More Space”
Proposed Dates: October 5th through October 9th, 2026
Antalya, Turkey
Contact Us:
Our website is www.isec.org.
You can find us on Facebook, X, Flickr, LinkedIn, Instagram, YouTube, Mastodon, Threads, Bluesky and Reddit.
Support us:
Sign up to be a member at: https://www.isec.org/membership
You can also give directly using the “Donate” link at the bottom of our website page.
Does your place of employment do matching funds for donations or volunteer time through Benevity? If so, you can make ISEC your recipient. Our 501(c)(3) number is 80-0302896.